平成28年度 近津研究室 第二十四期生
卒業論文
アクションカメラによる密集市街地の3Dモデリングについて
目次
1章 研究背景
2章 理論
3章 レンズディストーション
4章 実験概要
5章 実験結果
6章 結論・参考文献
1章
研究背景
1.1はじめに
現代では国土交通省がi-constructionを推進している。
i-constructionとはCIM(Construction.Information.Modelimg),BIM(Building.Information.Modeling)
を統合して建設現場の生産性を向上させるためのシステムである。例えば、測量ではドローンによる空撮写真をもとに、短時間で高密度な地形の3次元測量を行う。地形の3Dデータは設計や施工計画にひき継がれ、現況地形と設計図面を3Dモデルによって比較し、切り土量や盛り土量を自動算出する。そして施工では、3Dマシンコントロールや3Dマシンガイダンスなどの制御機能を搭載したICT建設機械を3次元設計データで自動制御して施工を効率化する。最後の検査でもドローンによる空撮写真などを使った3次元測量で検査を行い、出来形書類をなくし、検査項目を半減させるという。
私たちはi-constructionを踏まえたうえで細い路地や廊下などの撮影高度が確保しにくい場所での3Dモデリングを行うために持ち運びや手軽に撮影できるアクションカメラを使用した。建設現場での土木測量に対してのアクションカメラの有効性についての可能性を検討する。
1.2 アクションカメラ写真測量の長所・短所
デジタルカメラとアクションカメラを比べアクションカメラ写真測量についての長所と短所を以下にまとめてみた。
・長所
①広角が広い
デジタルカメラと比べより広い範囲を写すことができる。
②撮影高度が短くて済む
対象物との距離が短くても広い範囲を撮影することができる。
③持ち運びがしやすく気軽に撮影できる。
アクションカメラの中には頭にセットするタイプや自転車にセットするタイプがあり両手がふさがっていたとしても臨場感あふれる動画を撮影することが可能である。
・短所
①撮影した画像が歪んでいる。
撮影対象物がどうしても歪んでしまう。
②精度が低い。
通常の写真と違って無理に湾曲させ広い範囲を写しているため画像を補正した際にどうしても通常よりも精度が落ちる。
2章
理論
2.1 カメラの性能評価
2.1.1 広角歪
一般にアクションカメラは超広角であるため、アクションカメラの利用にあたっては広角歪の補正が必要である。図2.1は魚眼レンズのカメラモデルを示したものである。
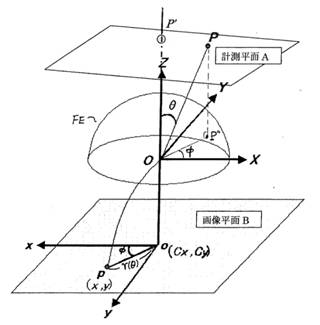
図2.1 広角歪みの補正
図2.1において魚眼レンズの投影を等距離投影とすると、
r=f・θ (2.1)
ここに、θ:光軸と入射角のなす角、r:主点から像点までの距離、f:焦点距離
一方、入射角θに対するピンホールカメラの透視射影では、
R=f・tanθ (2.2)
点Pに対する方向角をφとすると(x,y)は
 =R
=R (2.3)
(2.3)
さらにx,y方向に対するスケールをmx,myとすると点P’(x’,y’)は次式より計算される(Kannala J. and Brandt S., 2004)
 =
= +
+ (2.4)
(2.4)
ここに、mx=my=(縦方向の画素数/縦方向のセンサーサイズ)

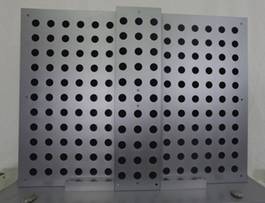
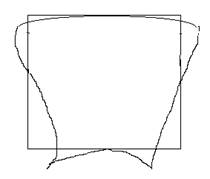
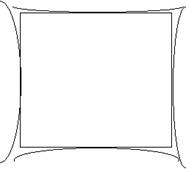
図2.2 魚眼画像(補正前) 図2.3 魚眼画像(補正後)
図2.2はテストターゲット(高さ:480mm, 幅:640mm, 厚さ:20mm、直径20mm
、ターゲット間隔:40mm、円形ターゲットの加工精度±0.05mm)をGoProで取得された画像であり、図2.3は広角歪の補正後の画像である。
2.1.2 放射・接線歪
デジタルカメラによる高精度測定のためには次の図に示す放射・接線歪みの補正を行う必要がある。
2.2 カメラキャリブレーション
本研究では以下においては式(2.5)に示すBrown(1971)の補正式を用いてMN1、GoPro(広角補正後)に対するカメラキャリブレーションを行う。
x=x’+ (k1r3+k2r5+k3r7)+p1(r2+2x’2)+2p2x’y’
(k1r3+k2r5+k3r7)+p1(r2+2x’2)+2p2x’y’
y=y’+ (k1r3+k2r5+k3r7)+p1(r2+2y’2)+2p1x’y’ (2.5)
(k1r3+k2r5+k3r7)+p1(r2+2y’2)+2p1x’y’ (2.5)
ここに、x,y:歪みを調節した画像座標、x’,y’:歪みを持つ画像座標、
r= 、k1,k2,k3:放射方向歪み係数、p1,p2:接線方向歪み係数
、k1,k2,k3:放射方向歪み係数、p1,p2:接線方向歪み係数
カメラキャリブレーションとは、camera resectioning とも呼ばれ、レンズおよびイメージまたはビデオカメラのイメージセンサーのパラメーターを推定します。これらのパラメータを使用して、レンズ歪の修正やオブジェクトのワールド単位でのサイズ測定、シーン内のカメラ位置の判定などを実行できます。
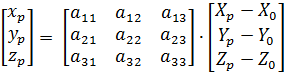
x=-f (2.6)
(2.6)
ここに、x,y:画像座標、X,Y,Z:基準点の三次元座標
a11=cosφcosκ, a12=-cosφsinκ, a13=sinφ
a21=cosωsinκ+sinωsinφcosκ, a22=cosωcosκ-sinωsinφsinκ, a23=-sinωcosφ
a31=sinωsinκ-cosωsinφcosκ, a32=sinωcosκ+cosωsinφsinκ, a33=cosωcosφ
私たちが研究で使用したモデリングソフトはPix4Dmapperである。このソフトはブラックボックスであるため、ソフトの理論については判明されていない。
ここでは写真測量の基礎理論についてまとめる。
2.3 写真測量の基本原理
まず左右写真の視差差から、対象物の三次元情報を取得する。この時の基本原理は共線条件である(共線条件は2.3.1に示す)。
このとき、三次元情報を取得する際に地上対象物に対する左右カメラの位置(この計算を外部標定(相対標定)と呼ぶ)と写真のサイズやレンズの焦点距離・歪みの情報(この計算を内部標定と呼ぶ)が必要である。
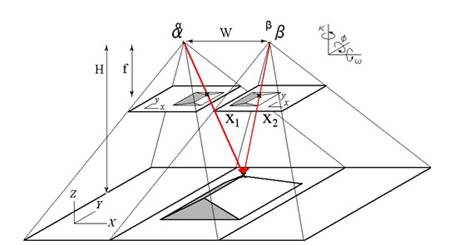
図2.4 カメラキャリブレーション
2.3.1 共線条件式の誘導
写真測量の基本原理は、図2.3に示す空間上の対象物P、対象物の写真上の像点p、そしてカメラのレンズ中心Oは一直線上に存在するというカメラの幾何学的条件に基づいている。この幾何学的条件を写真測量では「共線条件」と呼んでおり、共線条件より導かれる共線条件式は写真測量で最も重要な基本式である。以下に共線条件式を誘導する。
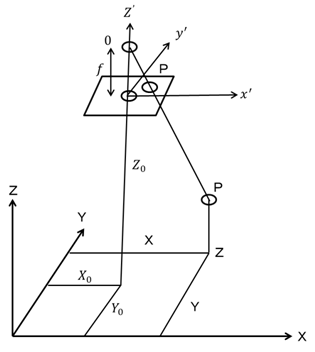
図2.5 傾きのないカメラでの幾何学的条件
図2.5において点O,P,pが一直線上にある条件は
図2.5において点O、P、pが一直線上にある条件は

 (2.7)
(2.7)

ゆえに(2.7)式は
 (2.8)
(2.8)

図 2.6 傾きのある幾何学的条件
ところで、一般的な写真は図2.6に示すように傾きを持って撮影されている。従って傾いてないカメラ座標系 と傾いたカメラ座標系
と傾いたカメラ座標系 との関係は、
との関係は、
 (2.9)
(2.9)

となる。(2.9)式より
 (2.10)
(2.10)
よって(2.8)式は次式となる。
 (2.11)
(2.11)
(2.11)式より
 (2.12)
(2.12)
(2.12)式より
 (2.13.1)
(2.13.1)
 (2.13.2)
(2.13.2)
 (2.13.3)
(2.13.3)
(2.13.3)式より
 (2.13.4)
(2.13.4)
(2.13.4)式を(2.13.1)式、(2.13.2)式の右辺に代入すると
 (2.14)
(2.14) 
(2.14)式を (焦点距離)とすると
(焦点距離)とすると
 (2.15)
(2.15)

(2.15)式が共線条件式であり、共線条件式は対象物P(X,Y,Z)を点Oの位置から撮影した時、対応する像点 の写真座標p(
の写真座標p( )を与える。
)を与える。
一方、共線条件式は写真座標 と標高Zを与えて地上座標(X,Y)を求める式に書き直すことが出来る。
と標高Zを与えて地上座標(X,Y)を求める式に書き直すことが出来る。
 (2.16)
(2.16)

(2.16)式は測定対象物の標高Zが与えられれば、測定対象物の地上平面座標(X,Y)が対応する写真座標より求められることを示している。
2.4 カメラの標定
測定器で標準通りの値を得るために、標準機などを用いてその機器の偏りを計測したり、正しい値になるよう調整したりすることをカメラの設定およびキャリブレーションと呼び、
前述の共線条件式に含まれる外部標定要素の6個の未知量を求める。そのためには3点以上の基準点に対して共線条件を適用すれば良い。しかし共線条件は非線形であるため以下に示すように未知量に近似値を与えて近似値の回りにテーラー展開し共線条件式を線形化する必要がある。
6個の未知量: カメラの位置
姿勢 
(2.15)式の分母、分子をそれぞれ

 (2.17)
(2.17)

とすると、(2.15)式は
 (2.18)
(2.18)
となる。
(2.18)式を変形してF = 0、 とすると次式が与えられる。
とすると次式が与えられる。

 (2.19)
(2.19)
そこで、未知量 ,
, )に対する各補正量をそれぞれ
)に対する各補正量をそれぞれ ,
, )として、(2.19)式を近似値の回りにテーラー展開し、2次以上の項を無視すると次式が得られる。
)として、(2.19)式を近似値の回りにテーラー展開し、2次以上の項を無視すると次式が得られる。

 (2.20)
(2.20)


ただし 、
、 は未知量に近似値を代入して得られる値である。
は未知量に近似値を代入して得られる値である。
(2.20)式に初期近似値を与えることにより各基準点に対して以下に示す観測方程式が得られる。
 (2.21)
(2.21)
なお、 、
、 は写真座標の残差である。
は写真座標の残差である。
各補正値は、最小二乗法の原理により次の重み付き関数 を最小とする値として最確値を求めて近似値を補正し、再び同様の操作を補正量が十分小さくなるまで繰り返すことにより収束解を得る。
を最小とする値として最確値を求めて近似値を補正し、再び同様の操作を補正量が十分小さくなるまで繰り返すことにより収束解を得る。
 (2.22)
(2.22)
ここに[ ]:ガウスの総和記号、 :写真座標に関する重み
:写真座標に関する重み
2.5 アクションカメラの標定
2.5.1 カメラモデル
アクションカメラを写真測量に用いるためには、アクションカメラの標定を行う必要がある。標定を行う際に基本的には共線条件を用いて標定要素を求めるが、他にCCDセンサーの電圧的歪みやレンズディストーション、焦点距離などの内部標定要素をも考慮して標定を行う必要がある。
2.5.2 CCDセンサー
CCDセンサーとはホトダイオードとそれに近接して「CCDという電荷転送素子」を備えたデバイスのことである。CCDとはcharge coupled deviceの略で電荷結合素子を意味しますが、半導体の上に絶縁体を介して電極を多数配列させた構成で、電極にあるパターンの駆動電圧を印加すると、半導体に蓄積された電荷を移動させることができる。
銀塩カメラはハロゲン化銀の感光性を利用しカプラーが発色して画像をつくるが、アクションカメラはCCDセンサーの中のホトダイオードがハロゲン化銀の役割を担っている。ホトダイオードでは光電効果(半導体のpn接合に光が当たると起電力が発生する内部光電効果)という現象を利用して光が電荷に変換される。
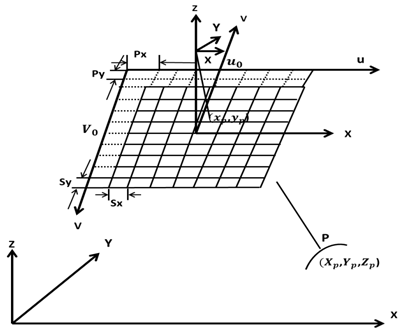
図2.7 CCDセンサーにおける幾何学的条件
Step1 地上座標からカメラ座標への変換
図2.7において測点Pの地上座標を( )、カメラ座標系における点Pの座標を(
)、カメラ座標系における点Pの座標を( )及び撮影点Oの地上座標を(
)及び撮影点Oの地上座標を( )とする。
)とする。 軸、
軸、 軸および
軸および 軸回りのカメラの回転角を
軸回りのカメラの回転角を 、
、 および
および とすると()は次式で与えられる。
とすると()は次式で与えられる。
 (2.23)
(2.23)
ここに、 :
: 、
、 、
、 を含む回転行列要素
を含む回転行列要素
Step2 地上座標からカメラ座標への変換
測点Pに対応する像点pのセンサー座標を( )とすると、()は共線条件より次式となる。
)とすると、()は共線条件より次式となる。
 (2.24)
(2.24)
ここに、 :焦点距離
:焦点距離
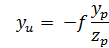
Step3 レンズディストーション
理想的なレンズでは、図2.8に示されるように、入射角 の平行光は、像面上の光軸点
の平行光は、像面上の光軸点 から
から だけ離れた点
だけ離れた点 に像を結ぶ。しかし実際には、レンズの歪みの影響により、点から
に像を結ぶ。しかし実際には、レンズの歪みの影響により、点から だけずれた点
だけずれた点 に結像される。このずれを入射角θでの平行光の放射方向歪曲収差と呼んでいる。放射方向歪曲収差は、次に示すように入射角または、主点からの距離
に結像される。このずれを入射角θでの平行光の放射方向歪曲収差と呼んでいる。放射方向歪曲収差は、次に示すように入射角または、主点からの距離 の関数で与えられる。
の関数で与えられる。
 (2.25)
(2.25)
または
 (2.26)
(2.26)
 または、係数
または、係数 (i=0,3)はカメラ検定の成果から与えられる。
(i=0,3)はカメラ検定の成果から与えられる。
図2.8 理想的なレンズによる結像と実際のレンズによる結像
さて、(2.24)式より求められる()には、レンズディストーションが考慮されていない。したがって、レンズディストーションを含む像点pの座標を改めて( )とすると()は次式となる。
)とすると()は次式となる。
 (2.27)
(2.27)

ここに、 のとき
のとき



 ,
, 

なお、ここでは接線方向のディストーションは放物方向のディストーションに比べて極めて小さいので放物方向のディストーションだけを考慮することとする。
Step4 センサー座標から地上座標への変換
図2.7におけるピクセルサイズ はテレビ標準方式によりセルサイズ
はテレビ標準方式によりセルサイズ と等しいことを考慮して、方向に対するスケールファクタを
と等しいことを考慮して、方向に対するスケールファクタを 軸の非直交性ファクターを
軸の非直交性ファクターを および
および を画像主点とすると、センサー座標()と画面座標(
を画像主点とすると、センサー座標()と画面座標( )との関係はアフィン変換により次式となる。
)との関係はアフィン変換により次式となる。
 (2.28)
(2.28)
またピクセルサイズ は、セルサイズ
は、セルサイズ 、CCDカメラおよびA/Dコンバータの水平駆動周波数をそれぞれ
、CCDカメラおよびA/Dコンバータの水平駆動周波数をそれぞれ とするとおよびは次式となる。
とするとおよびは次式となる。
 (2.29)
(2.29)

一方、スケールファクタ 、
、 は
は
 (2.30)
(2.30)

であるから、ここで比率( )における何らかの不確定要因による影響、いわゆるラインジッタの影響によるファクターを
)における何らかの不確定要因による影響、いわゆるラインジッタの影響によるファクターを とし、
とし、 を
を と置き換え、(2.30)式を(2.28)式に代入すると次式となる。
と置き換え、(2.30)式を(2.28)式に代入すると次式となる。
 (2.31)
(2.31)

ここに、


2.5.3 デジタルカメラの標定における基本式の誘導
デジタルカメラの標定は共線条件式が基本となり、(2.24)式、(2.27)式および(2.31)式より次式が得られる。
 (2.32)
(2.32)

(2.32)式における未知量は外部標定要素 、内部標定要素
、内部標定要素 の計12個となる。
の計12個となる。
(2.32)式に含まれる未知量を求めるためには6個以上の基準点に対して共線条件を適用すれば良い。しかし(2.32)式は非線形であるため、各未知量に対する補正量を として(31)式を近似値の回りにテーラー展開することによって線形化し2次以上の項を無視すると初期近似値を与えることにより次の観測方程式が各基準点に対して得られる。
として(31)式を近似値の回りにテーラー展開することによって線形化し2次以上の項を無視すると初期近似値を与えることにより次の観測方程式が各基準点に対して得られる。
 (2.33)
(2.33)
ただし、は(2.32)式の未知量に近似値を代入して得られる値であり、 、
、 は画素座標の残差である。
は画素座標の残差である。
各補正値は、最小二乗法の原理により次の重み付き関数 を最小とする値として最確値を求めて近似値を補正し、再び同様の操作を補正量が十分小さくなるまで繰り返すことにより収束解を得る。
を最小とする値として最確値を求めて近似値を補正し、再び同様の操作を補正量が十分小さくなるまで繰り返すことにより収束解を得る。
 (2.34)
(2.34)
ここに[ ]:ガウスの総和記号、:画面座標に関する重み
2.5.4 初期値の設定
CCDカメラの標定における調整計算を行うためには、各未知量に対する初期近似値が必要となる。CCDカメラの標定を行う場合の各未知量に対する初期近似値の設定方法について以下に述べる。
外部標定要素の初期近似値については、共線条件式においてZに基準点の平均標高 を与えて得られる次式と
を与えて得られる次式と


(2.35)
次の2次の射影変換式との整合性を利用して求められる値とする。
 (2.36)
(2.36)
また、焦点距離( )の初期値はExif情報に記載された値とし、主点位置()はA/Dコンバータの画像メモリー領域の中心ピクセル値を採用し、
)の初期値はExif情報に記載された値とし、主点位置()はA/Dコンバータの画像メモリー領域の中心ピクセル値を採用し、 および
および は極めて小さい値推定されるため0とする。したがって、ここでは
は極めて小さい値推定されるため0とする。したがって、ここでは に対する初期値の設定について述べる。
に対する初期値の設定について述べる。
の初期値には(36)式より算出されるを利用するか、センサー1ラインの有効画素数を および画面1ラインの画素数を
および画面1ラインの画素数を として次式による推定値が利用される。
として次式による推定値が利用される。
 (2.37)
(2.37)
例えば、有効画素数:768(H)×494(V)、センササイズ:1/2サイズ(6.40 x 4.80 [ ])、水平駆動周波数:14.318MHzのCCDカメラと12.280MHzのA/Dコンバータを使用した場合、セルサイズ
])、水平駆動周波数:14.318MHzのCCDカメラと12.280MHzのA/Dコンバータを使用した場合、セルサイズ はそれぞれ
はそれぞれ


となるから、(2.30)式より
=
となり、この値を用いて
= 
と初期近似値が計算される。
なお、この場合の は
は となる。
となる。
しかし、最近のではカメラ諸元からセンササイズの情報が公開されておらず、セルサイズを知ることが困難となっている。そこで、本論文ではExif情報に記載されている焦点距離の値に着目し、撮影空間における2点間の水平方向の長さから、その画像上の長さとの関係を利用した(37)式により算出された値が、表2.1に示す一般的なセンサタイプの中で最も近いセンササイズを採用し、スケールファクタおよび を求めることとしている。
を求めることとしている。
なお、Exifとは社団法人電子情報技術産業協会(JEITA:Japan Electronics and Information Technology Association)が規定する「ディジタルスチルカメラ用画像ファイルフォーマット規格」における Exchangeable image files format の略称であり、複数のファイル規定およびタグにより構成されている。なお、センササイズの推定に使用する焦点距離の情報は、撮影条件に関するタグの中に入っている。
 (2.38)
(2.38)
ここに、 :水平方向のセンササイズ、
:水平方向のセンササイズ、 :センサ1ラインの画素数(
:センサ1ラインの画素数( )、
)、 :2点間の距離()
:2点間の距離()
 :2点間の画像上の距離()、
:2点間の画像上の距離()、 :撮影高度()、:Exifに記載されている焦点距離()
:撮影高度()、:Exifに記載されている焦点距離()
2.5.5 調整計算
カメラの標定における調整計算は前述の方法より求められた初期近似値を第一近似値として各未知量に対する第一補正量の最確値を求め、これを第一近似値に加えたものを第二近似値とし、第二補正量を求める。以下同様にして補正量が無視できるほど小さくなるまで収束計算を繰り返して収束解を求める。実際には収束計算の前後における画面座標の平均二乗誤差が 以下になった時点で収束したとみなす。なお、5回程度の繰り返し計算で収束しない場合には、画面座標あるいは基準点座標に対する過大誤差、基準点の配置、制約条件の数等を確認する必要がある。
以下になった時点で収束したとみなす。なお、5回程度の繰り返し計算で収束しない場合には、画面座標あるいは基準点座標に対する過大誤差、基準点の配置、制約条件の数等を確認する必要がある。
3章
レンズディストーション
3.1 レンズディストーション(歪曲収差)
レンズの収差には、像が歪む現象が存在する。それが、歪曲収差(ディストーション)である。通常は、物体とレンズの像は相似が理想であるが、像の周辺で縮んだり、伸びたりして、像が歪むことがある。像の端ほどより縮む場合、接線方向歪曲収差と呼ぶ。一方、像の端ほどより伸びる場合は、放射方向歪曲収差という。
ディストーションは、絞りの位置によって変化し、対称形レンズの中央に絞りを置くとキャンセルすることが出来る。凸レンズの場合、絞りがレンズの像側にあれば、放射方向歪曲収差になり、一方物体側に絞りを置くと接線方向歪曲収差になる。デジタルカメラによる高精度測定のためには、下の図に示す放射・接線歪の補正を行う必要がある。
(a)接線方向歪曲収差 (b)放射方向歪曲収差
図3.1 歪曲収差による画像のひずみ
3.2 レンズディストーションモデル
レンズディストーションの影響を補正するためにこれまでに様々なレンズディストーションモデルが提案されている。放射方向歪みや接線方向歪みのレンズディストーション補正に関して放射方向歪みは式(3.1)によって表され、さまざまなレンズディストーションモデルの基本として用いられている。
d(r)=K1r3+K2r5+K3r7+… (3.1)
ここに、d:放射方向歪曲収差の補正量,r2=x2+y2:主点からの距離,Ki:放射方向歪み係数
また現在、一般的なレンズディストーションモデルである放射方向3次多項式、放射方向5次多項式、放射方向7次多項式、放射方向3次多項式および接線方向歪補正項、放射方向5次多項式および接線方向歪補正項、放射方向7次多項式および接線方向歪補正項をそれぞれ式(3.2)、式(3.3)、式(3.4)、式(3.5)、式(3.6)、式(3.7)に示す。
dx= (K1r3)
(K1r3)
dy= (K1r3) (3.2)
(K1r3) (3.2)
dx=(K1r3+K2r5)
dy=(K1r3+K2r5) (3.3)
dx=(K1r3+K2r5+K3r7)
dy=(K1r3+K2r5+K3r7) (3.4)
dx=(K1r3)+P1(r2+2x2)+2P2xy
dy=(K1r3)+P1(r2+2y2)+2P1xy (3.5)
dx=(K1r3+K2r5)+P1(r2+2x2)+2P2xy
dy=(K1r3+K2r5)+P2(r2+2y2)+2P1xy (3.6)
dx=(K1r3+K2r5+K3r7)+P1(r2+2x2)+2P2xy
dy=(K1r3+K2r5+K3r7)+P2(r2+2y2)+2P1xy (3.7)
ここに、dx,dy : 補正量,x,y :画面座標,P1,P1:接線方向歪み係数,r2=x2+y2:主点からの距離
K1 ,K2,K3:放射方向歪み係数
非測定用カメラのキャリブレーション式を以下に載せる。
dx=P1(r2+2x2)+2P2xy
dy=P2(r2+2y2)+2P1xy (3.8)

 dx= P1(r2+2x2)+2P2xy (1+P3r2+P4r4)
dx= P1(r2+2x2)+2P2xy (1+P3r2+P4r4)
dy= P2(r2+2y2)+2P1xy (1+P3r2+P4r4) (3.9)

 dx=(K1r3+K2r5+K3r7)+ P1(r2+2x2)+2P2xy (1+P3r2+P4r4)
dx=(K1r3+K2r5+K3r7)+ P1(r2+2x2)+2P2xy (1+P3r2+P4r4)

 dy=(K1r3+K2r5+K3r7)+P2(r2+2y2+2P1xy (1+P3r2+P4r4)(3.10)
dy=(K1r3+K2r5+K3r7)+P2(r2+2y2+2P1xy (1+P3r2+P4r4)(3.10)
dx=(K1r3+K2r5+K3r7)+q1x+q2y+q3xy+q4y2
dx=(K1r3+K2r5+K3r7)+q5xy+q6x2 (3.11)
ここに、q1,q2,q3,q4,q5,q6:センサ平坦度歪み係数
4章
実験概要
4.1 実験器具
本研究で使用した使用器具・使用したソフトを以下に載せる。
(1) ・魚眼カメラの精度検証:GoProHERO4・テストターゲット・DISTO D3
・3Dモデル作成 :GoProHERO4・デジタルカメラ・Pix4Dmapper
・撮影画像の歪み加工 :ProDRENARIN

図4.1 GoPro HERO4 SILVER
|
カメラ名 |
GoPro HERO4 |
|
画像サイズ(Pixel) |
4000×3000 |
|
焦点距離(mm) |
3.00 |
|
撮像素子 |
1/2.3型 |
|
センサーサイズ(mm) |
6.2×4.6 |
表4.1 GoPro HERO4の諸元
(2) ・魚眼カメラの精度検証:RICOH WG-M2・テストターゲット・DISTO D3
・3Dモデル作成 :RICOH WG-M2・デジタルカメラ・Pix4Dmapper
・撮影画像の歪み加工 :ProDRENARIN

図4.2 RICOH WG-M2
|
カメラ名 |
RICOH WG-M2 |
|
画像サイズ(Pixel) |
3264×2448 |
|
焦点距離(mm) |
1.60 |
|
撮像素子 |
1/2.3型 |
|
センサーサイズ(mm) |
6.2×4.6 |
表4.2 RICOH WG-M2の諸元
(3) ・魚眼カメラの精度検証
:OLYMPUS STYLUS TG-TRACKER・テストターゲット・DISTO D3
・3Dモデル作成
:OLYMPUS STYLUS TG-TRACKER・デジタルカメラ・Pix4Dmapper
・撮影画像の歪み加工 :ProDRENARIN

図4.3 OLYMPUS STYLUS TG-TRACKER
|
カメラ名 |
OLYMPUS STYLUS TG-TRACKER |
|
画像サイズ(Pixel) |
3840×2160 |
|
焦点距離(mm) |
1.58 |
|
撮像素子 |
1/2.3型 |
|
センサーサイズ(mm) |
6.2×4.6 |
表4.3 OLYMPUS STYLUS TG-TRACKERの諸元
(4) ・魚眼カメラの精度検証:Panasonic HX-A1H・テストターゲット・DISTO D3
・3Dモデル作成 :Panasonic HX-A1H・デジタルカメラ・Pix4Dmapper
・撮影画像の歪み加工 :ProDRENARIN

図4.4 Panasonic HX-A1H
|
カメラ名 |
Panasonic HX-A1H |
|
画像サイズ(Pixel) |
2176×1226 |
|
焦点距離(mm) |
2.60 |
|
撮像素子 |
1/3型 |
|
センサーサイズ(mm) |
4.4×3.6 |
表4.4 Panasonic HX-A1Hの諸元
本研究では、ProDRENALIN,AutoAcquisition,prjGetRelativePats.exe,CameraCalibration,Pix4Dmapper(評価版)を使用する。
詳細は、以下の表に載せる。
|
|
Version |
販売価格 |
販売国 |
|
Pix4Dmapper
(評価版) |
2.0.81 |
評価版につき無料 |
スイス |
表4.5 Pix4Dmapperの詳細
本研究で使用したキャリブレーションモデルは、外部標定要素{カメラの位置(X0,Y0,Z0)・姿勢(ω,φ,κ)}と内部標定要素{焦点距離(f)、スケールファクタ(a)、せん断係数(a)、放射歪み係数(K1、K2)、接線歪み係数(P1,P2)}を未知量として、これらを最小二乗法の原理に従い求めるものである。その結果により平面精度(σxy)を算出する。さらに、平面精度を、(5.1)式から焦点距離ごとに算出される標準精度(σx0y0)で出した値を相対精度として本実験での精度の判断基準とした。したがって相対精度が1に近いほど精度が高くなる。なお、平面精度とは検証点86点のx,y座標に対する誤差の平均二乗誤差である。
σx0y0=( )・σp (5.1)
)・σp (5.1)
σx0y0:標準精度、H:撮影高度、f:焦点距離、σp:読み取り精度
4.2 検証内容
アクションカメラとデジタルカメラを同じ撮影高度に設定してテストターゲットを真ん中から1枚撮影し、どのくらいの面積が撮れるかを検討する。
前述に載せたそれぞれのアクションカメラの精度検証を行い比較する。この際にProDRENALINを使用して画像の歪みを補正する。比較したアクションカメラの中で最も良い精度が出たアクションカメラを使用して3Dモデルを作成する。
3Dモデルに使用する写真は、アクションカメラで動画をとりその動画を写真に変換するアプリケーションを使い、それで得た写真をProDRENALINで歪みを補正し3Dモデル化する。
4.2.1 アクションカメラの精度検証
本研究で用いる魚眼カメラが研究室内にあるテストターゲットを対象に撮影を行い、4つのアクションカメラのそれぞれの精度検証を行った。
テストターゲットは高さ:480mm, 幅:640mm, 厚さ:20mm(中央3列), 各円形ターゲットの加工精度±0.05mmである。本研究ではP.Aの値を評価指標として2箇所(左、右)において撮影されたトリプレット画像の組み合わせについて分析した。なお、ステレオ画像に対する基線比は0.34とした。精度検証は青枠で囲った13点を基準点としたカメラキャリブレーションをそれぞれ実施した後,赤枠で囲った検証点86点に対する三次元座標を算出して評価を行なった。なお、測定はそれぞれ3回ずつ行った。

図4.5 テストターゲット
5章
実験結果
5.1 アクションカメラとデジタルカメラの撮影高度
|
GoPro HERO4 |
1/5275 |
|
RICOH WG-M2 |
1/3006 |
|
OLYMPUS STYLUS TG-TRACKER |
1/4086 |
|
Panasonic HX-A1H |
精度が出なかった |
表5.1 アクションカメラのそれぞれの精度
本研究で使用したキャリブレーションモデルは、外部標定要素{カメラの位置(X0,Y0,Z0)・姿勢(ω,φ,κ)}と内部標定要素{焦点距離(f)、スケールファクタ(a)、せん断係数(a)、放射歪み係数(K1、K2)、接線歪み係数(P1,P2)}を未知量として、これらを最小二乗法の原理に従い求めるものである。その結果により平面精度(σxy)を算出する。さらに、平面精度を、(5.1)式から焦点距離ごとに算出される標準精度(σx0y0)で出した値を相対精度として本実験での精度の判断基準とした。したがって相対精度が1に近いほど精度が高くなる。なお、平面精度とは検証点86点のx,y座標に対する誤差の平均二乗誤差である。
σx0y0=()・σp (5.1)
σx0y0:標準精度、H:撮影高度、f:焦点距離、σp:読み取り精度
6章
結論
6.1 結論
アクションカメラとデジタルカメラのテストターゲットの撮影できる範囲の違いからアクションカメラでは結構な広範囲を撮影できる。故に撮影枚数を比較的に減らすことができることがわかる。
また、アクションカメラで撮影した画像を加工し、精度検証を行った結果、理論値よりも精度は下回ってしまったが、今回行う実験で使用できる範囲の精度結果が出た。Panasonic HX-A1Hに関しては精度が出ないという結果になったが、原因としては他に比べ撮影高度が短く湾曲が大きかった為、画像補正ソフト(ProDRENALIN)を二回使用し補正を行う必要があり、キャリブレーションがうまく作動しなかった為などが考えられる。
3Dモデルではアクションカメラでとったままの写真と補正した写真を3D化したが、実験結果から分かる通り補正した写真の方が実物に近いモデルが出来た。そのため、将来アクションカメラの技術が発達していけば建設現場などでも十分実用可能であるのではないかと考える。